¿Cómo se hacen los mapas de fondo marino?
Historia
Los primeros mapas que se conocen sobre los mares solo representan la zona de agua contenida entre continentes y allí representaban islas y seres mitológicos, entre otros. Estos mapas los hicieron los navegantes y comerciantes para poderse orientar en sus viajes. A partir del año 100 a.C. encontramos mapas donde por medio de un escandallo, una cuerda con un peso en un extremo que se tira al agua, lograban mesurar profundidades.

Imatge 1 – Atles català del 1375, Biblioteca Nacional de França
El escandallo se tiraba hasta que tocaba fondo y entonces se recogía contando las brazas de cuerda que quedaban sumergidas. Pero no es hasta el 1877 que se hizo el primer mapa del Atlántico Norte utilizando esta técnica y es cuando se descubrió que había una sierra en medio del Atlántico que la atravesaba de norte a sur. A partir del siglo XXI, la aparición de nuevas tecnologías e intereses por el mar propulsó la cartografía marina moderna.
¿Para qué sirven?
Los mapas del fondo marino tienen muchas utilidades en diferentes ámbitos científicos, de conservación, en la industria y la política.
- En pesquerías. Estos mapas permiten determinar las zonas donde se encuentra la especie de interés que se quiere capturar y en qué cantidad. Así, los pescadores pueden aumentar su eficiencia de capturas.
- En la conservación de espacios protegidos. Gracias a los mapas se pueden delimitar las zonas de interés de protección y establecer unos límites para la creación de un área marina protegida.
- Para el conocimiento científico general y poder ampliar conocimientos que enriquezcan el saber humano.
- En navegación para establecer rutas seguras para el transporte de barcos a lo largo de todos los océanos.
- En geología, para encontrar zonas donde se puedan explotar recursos mineros, estudiar la creación y evolución de mares y océanos e incluso poder determinar la probabilidad de que suceda un terremoto y como consecuencia, un tsunami
- En biología y ecología, para estudiar los hábitats marinos, sobre todo aquellos de profundidad donde es imposible llegar buceando.
- En energías renovables, los mapas nos pueden determinar si es seguro instalar un parque eólico o solar sobre el mar.
- En la explotación de hidrocarburos como petróleo o gas natural.
- Para la instalación de cables de luz e internet o tuberías de gas y petróleo.
- Para la arqueología, ya que permite encontrar restos de ánforas, barcos y estructuras hundidas durante centenares o miles de años.
- Para localizar, rescatar y extraer restos de accidentes de aviones y/o barcos que se puedan haber hundido en el mar.
Imatge 2 – Àmfores enfonsades de l’època romana, Chris Roman
Dificultades al hacer una cartografía del fondo marino
En los mapas terrestres los datos se recogen por medio de imágenes o fotografías hechas desde satélites, aviones, helicópteros u otros aparatos aéreos o recopilando datos recorriendo la zona de la que se quiere hacer el mapa. Esto en el fondo marino no se puede hacer o es extremadamente costoso y difícil. Para poder ir por el fondo del mar es necesario un equipo de buceo autónomo que permite un rango espacial y temporal muy limitado porque la presión del agua sobre el cuerpo humano y la limitación de la botella de agua hace que no sea posible llegar a todas partes y tampoco podamos hacerlo de manera continuada, ya que es necesario salir regularmente a la superficie. Por otra parte, las imágenes aéreas no sirven porque las cualidades físicas del agua no permiten el paso de la luz a través de ella. Los científicos que se dedican a la cartografía marina necesitan, pues, de barcos especializados para poder adquirir los datos. Es por eso que solo se ha podido realizar aproximadamente un 15% de la cartografía de todo el fondo oceánico, mientras que, por ejemplo, de la tierra emergida se ha hecho un 100%. También es curioso ver como en cuerpos celestes como la Luna o Marte la resolución de los mapas de su superficie es de 2 m por píxel y entre 12 y 20 metros por pixel respectivamente, mientras que en los mapas extensos del fondo marino esta resolución es de aproximadamente 1 km por pixel. Y en aplicaciones como Google Maps, podemos encontrar resoluciones de hasta 0,25 m por pixel. Esto representa una gran diferencia en cuanto a la calidad entre unos mapas y otros.
¿Cómo se adquieren los datos?
El que se ha desarrollado para poder “ver” en el fondo marino es un sistema de aparatos que mediante ondas acústicas permiten obtener una imagen de sonido del fondo marino, a esta forma de adquirir datos se le llama “remote sensing”. Hay dos sistemas principales que utilizan esta técnica:
- Las ecosondas monohaz y multihaz que permiten realizar la batimetría, es decir, un mapa de profundidades del fondo. Los aparatos calculan el tiempo que tarda la onda acústica en ir del emisor al receptor, cuanto más tarde la onda en llegar al receptor, más profundo estará el fondo marino.
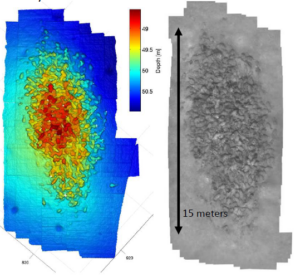
- El sistema de barrido lateral o SSD que mesura la intensidad de la onda acústica para poder realizar un mapa de intensidades del fondo marino. Cada material, morfología o textura del fondo devuelve una intensidad diferente y de este modo se pueden diferencias, por ejemplo, praderías de posidonia de fondos donde solo hay arena.
Estos ecosistemas se instalan en barcos de menor o mayor tamaño según la superficie de fondo marino que se quiera recubrir y permiten obtener una cobertura de toda la zona estudiada. Otro modo de adquirir los datos del fondo marino es pudiendo ver o extrayendo lo que hay encima del lecho marino. En zonas poco profundas donde llega la luz solar se utilizan buzos y cámaras instaladas en robots de tipo ROV (Remotely Operated Vehicle) para poder verlo, pero en zonas profundas donde no se puede llegar buceando y está completamente oscuro, se utilizan dragas, redes y diferentes tipos de testificadores para poder extraer una parte del fondo marino y poder ver qué especies y tipo de fondo hay. También existen ROV más grandes y equipados con luces y brazos mecanizados para poder ver a gran profundidad y manipular los elementos que interesen.
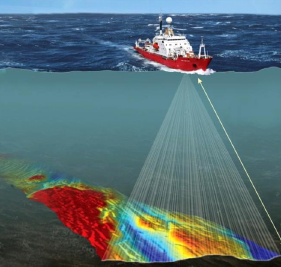
Imatge 3 – Representació gràfica de l’adquisició de dades amb una ecosonda multifeix, British Antarctic Survey
Tipos de mapas del fondo marino
En general, existen tres tipos de mapas que se pueden realizar del fondo marino
- Mapas de especies: estos mapas pretenden representar en que zonas es más probable poder encontrar un ejemplar de una especie en concreto. Estos tipos son muy usados por científicos para poder estudiar las migraciones, la distribución o el rango de movimiento de determinadas especies.
- Mapas de hábitats: en estos mapas se representan los diferentes hábitats o comunidades que se pueden encontrar en una determinada zona. Suelen ser muy útiles para delimitar zonas de especial interés para la protección y acabar formando áreas marinas protegidas.
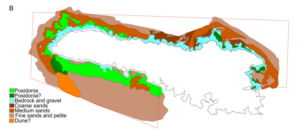
Imatge 4 – Mapa d’hàbitats costaners de l’illa de Lampedusa, Tonielli 2016
- Mapas de tipos de fondo abióticos: estos mapas suelen representar el material del cual está formado el fondo marino (fangos, arenas, grabas o rocas). Permiten representar zonas muy extensas y son especialmente útiles para saber si se puede instalar cualquier tipo de infraestructura en el fondo marino, como cables marinos o plataformas para molinos eólicos.
¿Cuál es el futuro de la cartografía marina?
Como se ha comentado anteriormente, la resolución entre mapas terrestres y mapas marinos es muy distante y uno de los objetivos para el futuro es poder reducir mucho esta diferencia. Donde también se están destinando muchos esfuerzos es en la adquisición automática de datos. Actualmente, casi siempre se requiere de un gran buque oceanográfico, que es muy caro porque consume grandes cantidades de combustible y debe llevar mucha tripulación a bordo. Por eso se está investigando en aparatos eléctricos autónomos tipo AUV y USV que van por debajo y por encima del agua respectivamente y que tienen ya incorporados aparatos de adquisición de datos. Otro defecto que tienen los mapas es que nunca están 100% actualizados porque el que se ilustra muestra solo un momento y las especies, los hábitats y la morfología submarina están en constante cambio. Hoy en día se está investigando en mapas que en tiempo real permitan ver como cambia el fondo marino y que estén aportando datos actualizados constantemente. Otro reto es realizar la cartografía del 100% del fondo oceánico y de momento solo llevamos aproximadamente un 15% del total, así que hacen falta muchos esfuerzos y muchos profesionales para poder realizarlo.


Imatge 5 – Autonomus Underwater Vehicle (AUV), MBARI Imatge 6 – Unmanned Surface Vehicle (USV), Oceanα
Bibliografía
- NOAA, Nacional Oceanic and Atmospheric Administration. https://oceanservice.noaa.gov/
- LecoursV, DevillersR, Schneider DC, LucieerVL, Brown CJ, EdingerEN (2015) Spatial scale and geographic context in benthic habitat mapping: review and future directions. Mar EcolProgSer535:259-284. https://doi.org/10.3354/meps11378
- ICES. 2001. Report of the Working Group on Marine Habitat Mapping. ICES CM 2000/E/08, Copenhagen
- Baker, E.K. andPeter T. Harris, 2012. Habitat MappingandMarineManagement, In SeafloorGeomorphologyas BenthicHabitat, Elsevier, London, Pages23-38, ISBN 9780123851406, https://doi.org/10.1016/B978-0-12-385140-6.00002-5.
- Sheehan, E., Rodriguez-Rodriguez, D., Foster, N., Nancollas, S., Cousens, S., Luke Holmes, Attrill, M., Pettifer, E., Jones, I., Vaz, S., Facq, J.-V., Germain, G. 2014. A comparative study of towed underwater video methodology to monitor benthic habitats in Marine Protected Areas. Report prepared by Ifremer, Sussex IFCA and Marine Institute for the Protected Area Network Across the Channel Ecosystem (PANACHE) project. INTERREG programme France (Channel) England funded project,, 46 p.
- NIWA, Climate, Freshwater and Marine Science. https://niwa.co.nz/
- OZCoasts, Australian Online Coastal Information. https://ozcoasts.org.au/
- Brown, C.J., Blondel, P., 2009. Developments in the application of multi-beam sonar backscatter for seafloor hábitat mapping. Applied Acoustics. 70, 1242-1247.
- Brown, C.J., Smith, S.J., Lawton, P., Anderson, J.T., 2011. Benthic habitat mapping: A review of progress towards improved understanding of the spatial ecology of the seafloor using acoustic techniques. Estuarine Coastal and Shelf Science. 92, 502-520.
- Brown, C.J., Sameoto, J.A. and Smith S.J. (2012) Multiple methods, maps and management applications: Purpose-made seafloor maps in support of Ocean Management. Journal of Sea Research. 72, In Press
- EMOdnet, European Marine Observation and Data Network. https://emodnet.ec.europa.eu/

