Com es fan els mapes del fons marí?
Història
Els primers mapes que es coneixen sobre els mars només representaven la zona d’aigua continguda entre continents i allí hi representaven bèsties, illes i éssers mitològics que creien que hi havia, clar no hi havia cap representació del fons marí. Aquests mapes els van fer els navegants i comerciants per a poder-se orientar en els seus viatges. A partir de l’any 100 aC trobem mapes on per mitjà d’un escandall, una corda amb un pes en un extrem que es tira a l’aigua, aconseguien mesurar profunditats.

Imatge 1 – Atles català del 1375, Biblioteca Nacional de França
L’escandall es llençava fins que tocava el fons i llavors es recollia contant les braces de corda que quedaven submergides. Però no és fins al 1877 que es va fer el primer mapa del fons de l’Atlàntic nord utilitzant aquesta tècnica i és quan es va trobar per primer cop que hi havia una serralada enmig de l’atlàntic que la travessava de nord a sud. A partir del segle XXI l’aparició de noves tecnologies i interessos pel mar van propulsar la cartografia marina moderna.
Per a què serveixen?
Els mapes dels fons marins tenen moltes utilitats en diferents àmbits científics, de conservació, en la indústria i la política.
- En pesqueries. Aquests mapes permeten determinar les zones on hi ha l’espècie d’interès que es vol capturar i en quina quantitat. Així els pescadors poden augmentar la seva eficiència de captures.
- En la conservació d’espais protegits. Gràcies als mapes es poden delimitar les zones d’interès de protecció i establir uns límits per a la creació d’una àrea marina protegida.
- Per al coneixement científic general i poder ampliar coneixements que enriqueixin el saber humà.
- En navegació per a establir rutes segures per al transport de vaixells al llarg de tots els oceans.
- En geologia, per a trobar zones on es puguin explotar recursos miners, estudiar la creació i evolució dels mars i oceans i inclús poder determinar la probabilitat que succeeixi un terratrèmol i com a conseqüència, un tsunami.
- En biologia i ecologia per a estudiar els hàbitats marins, sobretot aquells de profunditat on és impossible arribar bussejant.
- En energies renovables els mapes ens poden determinar si és segur instal·lar un parc eòlic o solar en el mar.
- Per a l’explotació d’hidrocarburs com ara el petroli o el gas natural.
- Per a la instal·lació de cables de llum i internet o canonades de gas i petroli.
- Per a l’arqueologia, ja que permet trobar restes d’anàfores, vaixells i estructures enfonsades durant centenars o milers d’anys.
- Per a localitzar, rescatar i extreure restes d’accidents d’avions o vaixells que es puguin haver enfonsat en el mar.
Imatge 2 – Àmfores enfonsades de l’època romana, Chris Roman
Dificultats a l’hora de fer una cartografia del fons marí
En els mapes terrestres les dades es recullen per mitjà d’imatges o fotografies fetes des de satèl·lits, avions, helicòpters o altres aparells aeris o recopilant dades recorrent la zona de la qual es vol fer el mapa. Això en el fons marí no es pot fer o és extremadament costós i difícil. Per a poder anar pel fons del mar és necessari d’un equip de busseig autònom que permet un rang espacial i temporal molt limitat, ja que la pressió de l’aigua sobre el cos humà i la limitació de l’ampolla d’aire fa que no puguem arribar a tot arreu i tampoc puguem fer-ho de manera continuada perquè es necessari sortir regularment a superfície. Per altra banda, les imatges aèries no serveixen, això és degut a que les qualitats físiques de l’aigua no permeten el pas de la llum a través d’ella. Els científics que es dediquen a la cartografia marina requereixen doncs de vaixells especialitzats per a poder adquirir les dades. És per això que només s’ha pogut realitzar aproximadament un 15% de la cartografia de tot el fons oceànic, metre que, per exemple, de la terra emergida se n’ha fet el 100%. També és curiós veure com en cossos celestes com la Lluna o Mart la resolució dels mapes de la seva superfície és de 2 m per píxel i entre 12 i 20 metres per píxel respectivament, mentre que en els mapes extensos del fons marí aquesta resolució és d’aproximadament 1 km per píxel. I en aplicacions com Google Maps, podem trobar resolucions de fins a 0,25 metres per píxel. Això representa una gran distància quant a qualitat entre uns mapes i els altres.
Com s’adquireixen les dades
El que s’ha desenvolupat per a poder “veure” en el fons marí és un sistema d’aparells que mitjançant ones acústiques permeten obtenir una imatge de soroll del fons marí, a aquesta mena d’adquisició de dades s’anomena “remote sensing”. Hi ha dos sistemes principals que utilitzen aquesta tècnica:
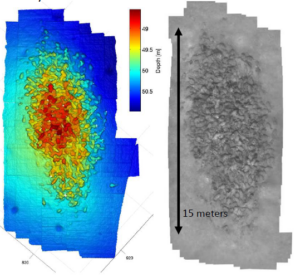
- Les ecosondes monofeix i multifeix que permeten realitzar la batimetria, és a dir, un mapa de la profunditat del fons. Els aparells calculen el temps que tarda l’ona acústica en anar del emissor al receptor, quan més tarda l’ona en arribar al receptor, més profund estarà el fons marí.
- Els sistemes d’escombrada lateral o SSD que mesuren la intensitat de l’ona acústica per a poder dur a terme un mapa d’intensitats del fons marí. Cada material, morfologia o textura del fons retorna una intensitat diferent i d’aquesta manera es poden diferenciar, per exemple, praderies de posidònia de fons on només hi ha sorra.
Aquests sistemes s’instal·len en vaixells de menor o major dimensió segons la superfície de fons marí que es vulgui recobrir i permet obtenir una cobertura de tota la zona estudiada. Una altra manera d’adquirir dades dels fons marins és podent veure o extreure el que hi ha sobre la superfície. En zones poc profundes on arriba la llum solar s’utilitzen busos i càmeres instal·lades en robots de tipus ROV (Remotely Operated Vehicle) per a veure-hi, pero en zones més profundes on no es pot arribar amb busos i és completament fosc, s’utilitzen dragues, xarxes i diferents tipus de “corer” per a extreure una part del fons marí i poder veure quines espècies i tipus de fons hi ha. També existeixen ROV més grans i equipats amb punts de llum i braços mecanitzats per a poder veure-hi a gran profunditat i manipular els elements que interessin.
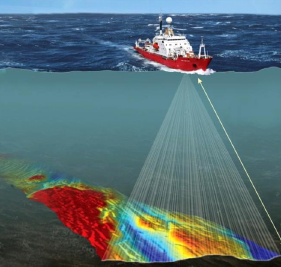
Imatge 3 – Representació gràfica de l’adquisició de dades amb una ecosonda multifeix, British Antarctic Survey
Tipus de mapes dels fons marins
En general, existeixen tres tipus de mapes que es poden realitzar del fons marí.
- Mapes d’espècies: aquests mapes pretenen representar en quines zones és més probable poder trobar un exemplar d’una espècie en concret. Aquests tipus són molt emprats per científics per a poder estudiar les migracions, la distribució o el rang de moviment de determinades espècies.
- Mapes d’habitats: en aquests mapes es representen els diferents habitats o comunitats que es poden trobar en una zona determinada. Solen ser molt útils per a delimitar zones d’especial interès per a la protecció i acabar formant àrees marines protegides.
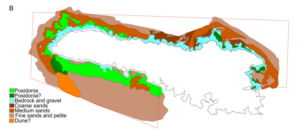
Imatge 4 – Mapa d’hàbitats costaners de l’illa de Lampedusa, Tonielli 2016
- Mapes de tipus de fons abiòtics: aquests mapes solen representar el material del qual està format el fons marí (fangs, sorres, graves o roca) i si està recobert o no per comunitats animals i vegetals. Permeten representar zones molt més extenses i són especialment útils per a saber si es pot instal·lar qualsevol mena d’infraestructura en el fons marí, com cables marins o plataformes per a molins eòlics.
Quin és el futur de la cartografia marina?
Com s’ha comentat abans, la resolució entre els mapes terres i els mapes marins és molt distant i uns dels objectius cara el futur és poder disminuir aquesta diferència. On també s’estan destinant molts esforços és en l’adquisició automàtica de dades. Actualment, quasi sempre es requereix un gran vaixell oceanogràfic, que és molt car perquè consumeix grans quantitats de combustible i ha de portar molta tripulació a bord. Per això s’està investigant en aparells elèctrics autònoms tipus AUV i USV que van per sota i sobre de l’aigua respectivament i que tenen ja incorporats aparells d’adquisició de dades. Un altre defecte que tenen els mapes és que mai estan 100% actualitzats perquè el que s’il·lustra és només un moment i les espècies, els hàbitats i la morfologia submarina estan en constant canvi. A dia d’avui s’està investigant en mapes que en temps real permetin veure com canvia el fons marí i que aportin dades actualitzades constantment. Un altre repte és realitzar la cartografia del 100% del fons oceànic i de moment només en portem aproximadament un 15% del total, així que calen molts esforços i molts professionals per a poder-ho dur a terme.


Imatge 5 – Autonomus Underwater Vehicle (AUV), MBARI Imatge 6 – Unmanned Surface Vehicle (USV), Oceanα
Bibliografia
- NOAA, Nacional Oceanic and Atmospheric Administration. https://oceanservice.noaa.gov/
- LecoursV, DevillersR, Schneider DC, LucieerVL, Brown CJ, EdingerEN (2015) Spatial scale and geographic context in benthic habitat mapping: review and future directions. Mar EcolProgSer535:259-284. https://doi.org/10.3354/meps11378
- ICES. 2001. Report of the Working Group on Marine Habitat Mapping. ICES CM 2000/E/08, Copenhagen
- Baker, E.K. andPeter T. Harris, 2012. Habitat MappingandMarineManagement, In SeafloorGeomorphologyas BenthicHabitat, Elsevier, London, Pages23-38, ISBN 9780123851406, https://doi.org/10.1016/B978-0-12-385140-6.00002-5.
- Sheehan, E., Rodriguez-Rodriguez, D., Foster, N., Nancollas, S., Cousens, S., Luke Holmes, Attrill, M., Pettifer, E., Jones, I., Vaz, S., Facq, J.-V., Germain, G. 2014. A comparative study of towed underwater video methodology to monitor benthic habitats in Marine Protected Areas. Report prepared by Ifremer, Sussex IFCA and Marine Institute for the Protected Area Network Across the Channel Ecosystem (PANACHE) project. INTERREG programme France (Channel) England funded project,, 46 p.
- NIWA, Climate, Freshwater and Marine Science. https://niwa.co.nz/
- OZCoasts, Australian Online Coastal Information. https://ozcoasts.org.au/
- Brown, C.J., Blondel, P., 2009. Developments in the application of multi-beam sonar backscatter for seafloor hábitat mapping. Applied Acoustics. 70, 1242-1247.
- Brown, C.J., Smith, S.J., Lawton, P., Anderson, J.T., 2011. Benthic habitat mapping: A review of progress towards improved understanding of the spatial ecology of the seafloor using acoustic techniques. Estuarine Coastal and Shelf Science. 92, 502-520.
- Brown, C.J., Sameoto, J.A. and Smith S.J. (2012) Multiple methods, maps and management applications: Purpose-made seafloor maps in support of Ocean Management. Journal of Sea Research. 72, In Press
- EMOdnet, European Marine Observation and Data Network. https://emodnet.ec.europa.eu/

